Project 32 Slalom™ negotiates moderate
turns like a motorcycle. To appreciate the impact of this on cornering power and
rollover stability, consider that a motorcycle has no side-by-side wheels, yet even in the
hardest of turns it does not flip over. A motorcycle's cornering power and stability
come from its ability to bank into curves with a lean-angle that precisely balances the
vector of forces in the turn.
The vector of forces might be envisioned as an arrow extending from the
vehicle's center of gravity (CG). Normally the arrow points straight down, in line
with gravitational pull. But in a turn, there is also centrifugal force acting
outward from the CG. The vector of forces then represents a combination of
gravitational force acting downward and centrifugal force acting laterally toward the
outside. Consequently, the vector assumes an angle or slope that is independent of
vehicle weight. On a motorcycle, the rider steers to keep the tire-to-road contact
patch aligned with this vector of forces. In other words, a lean (or bank, or tilt)
is accomplished to match the angle of this vector of forces. As shown in Figure T-1,
this is how the cyclist maintains balance.
|
Stability of Conventional Vehicles |
As
explained above, the force vector slopes outward in a turn. But ordinary three- and four-
wheel vehicles stay largely perpendicular to the pavement; they do not lean like a
motorcycle. So in a turn, the point at which the force vector projects to the
pavement shifts outward toward the "rollover threshold," which is an imaginary
line extending between the two outermost wheels. (Those two wheels carry all of the weight
just before tip-over, and stunt drivers will sometimes navigate a considerable distance on
those wheels alone.) Whenever the force vector crosses over this line, overturn follows
quickly.
A four-wheel car has its rollover threshold well to the side, and the CG
can be toward the front or toward the rear; it doesn't make a great difference. But a
three-wheeler must get all its rollover resistance from the side-by-side wheels at one end
of the platform because the single wheel at the other end offers no such resistance. If
the CG were midway along the wheelbase, a conventional three-wheeler would need its
side-by-side wheels twice as far apart, i.e. the track would have to be super-wide. In
actuality most three-wheelers have their CG close to the side-by-side wheels, typically
within 30% of the wheelbase, reducing the penalty in track width to the order of 30%. The
three-wheeler's triangular footprint causes another penalty in rollover margin that is not
present in conventional cars. It's not large, but designers must allow for it. Braking or
strong acceleration causes the force vector to shift forward or backward, and this brings
the vector a little closer to the rollover threshold. For typical geometry, this adds a
few percent to the track width needed for safety comparable to a four-wheeler. Figure T-2
shows the kind of analysis that must be performed to assure a good margin against
rollover.
| P32
versus Automobile in Turns |
P32
Slalom takes advantage of its tilt feature to cope with the foregoing challenges. By
leaning, it keeps the force vector in line with the body during typical turns, as shown in
Figure T-3. This allows to a saving of over 12 inches (305 mm) in width that would
otherwise be needed, and it drastically reduces the side-forces experienced by
occupants. It also reduces structural weight, aerodynamic drag, and the space
needed for parking.
Only in aggressive turns beyond the limit of lean does the force vector
begin to shift away from Slalom's centerline and toward the outside. But
since the magnitude of lateral turn-forces is limited by the tires' ability to grip the
road, a large margin of safety against rollover is still maintained. And the side
forces on occupants are only a fraction of those experienced in a conventional automobile
during an equivalent turn.
| P32's Proprietary Suspension |
P32
is not the first vehicle with a tilting suspension system. General Motors
experimented with a tilting three-wheeler in the '80s, the Lean Machine (Figure
T4), and reported fuel economy of 100 mpg, lighting fast acceleration, and superb
cornering capabilities. But the vehicle could not seat more than a single occupant,
it had a high learning curve (balancing it with pedals took practice), and it was never
developed for production. GM's internal market studies, however, indicated a
high market potential, even with the vehicle's inherent limitations.
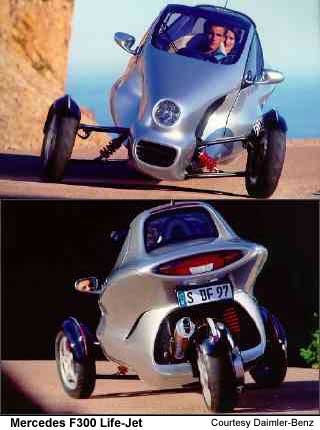
More recently, Mercedes' experimental Life
Jet F300 extended the performance envelope, and it can carry two occupants in
tandem. A precursor to the Life Jet was the 3VG prototype developed,
tested, and patented by staff of the environmentally-oriented Mother Earth News
magazine some 15 years ago. Mechanical arrangement on the two is remarkably
similar. Work on the 3VG was discontinued before automated leaning was
perfected.
But no one has met the challenge of sociable seating for two in a road
vehicle that tilts the way it should. P32 meets the challenge with a proprietary
new suspension system that is elegantly simple and allows both free and electronically
controlled tilt movements.
P32's
suspension allows either of two modes of operation, called Mode A and Mode B.
When operating in Mode A, tilt-angle is automatically controlled by an onboard
computer. The computer senses lateral acceleration and adjusts the vehicle's tilt
angle to keep it precisely in balance with the vector of forces. During Mode A
operation, the driver is essentially unaware that anything unusual is taking place. The vehicle steers just like any four-wheel vehicle, and the computer takes care of the
rest. In Mode B, the vehicle's tilt angle is controlled by the
operator, just as it is with a motorcycle. The vehicle banks into curves to remain
in balance with turn forces. |




{kind=link}